You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
5. Stack the RGB LED Lighting Shield with XMC1202 onto the Radar Baseboard XMC4700 via the Arduino stack headers.
165
+
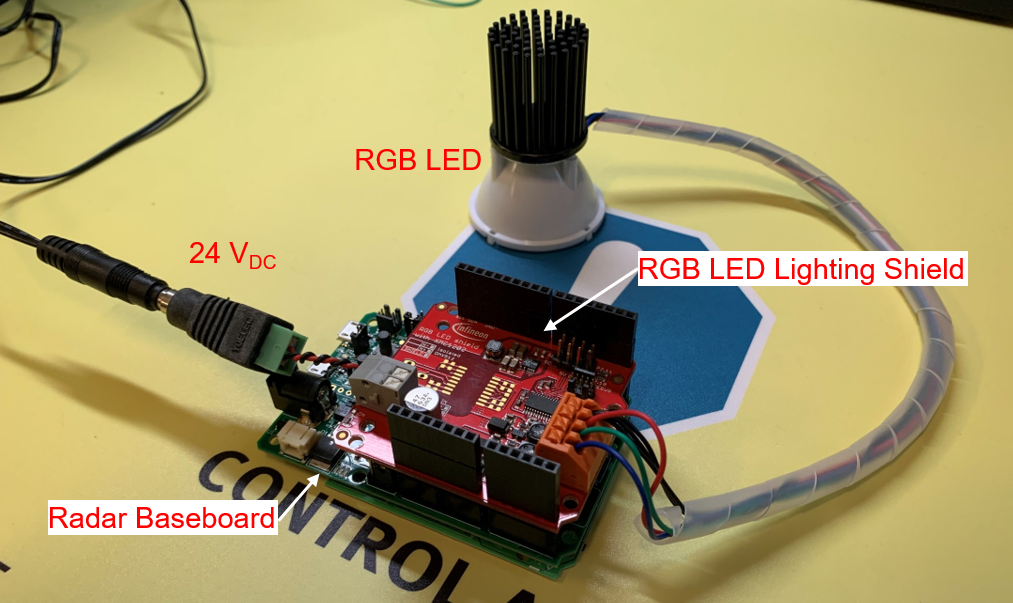
5. Stack the RGB LED Lighting Shield with XMC1202 onto the XMC4700 Radar Baseboard via the Arduino stack headers.
166
166
Also connect an RGB LED and a 24 VDC power adapter to the RGB LED Lighting Shield. **Do not turn the power on yet!**
167
167
For more information on setting up of the RGB LED Lighting Shield, please refer to [Infineon RGB LED Lighting Shield with XMC1202 for Arduino - User Manual](https://www.infineon.com/dgdl/Infineon-Board_Manual_-_XMC1202_-_RGB_LED_Lighting_Shield_with_XMC1202_for_Arduino_-_v1_0-UM-v01_00-EN.pdf?fileId=5546d46249be182c0149ccca3860734d).
168
168
169
169
170
170
171
171
6. Stack the Annikken Andee U shield onto the setup. Notice that there are several jumper wires on the Annikken Andee U board.
172
-
This is due to the hardware modifications required on the Radar Baseboard regarding the ISCP header as mentioned in [the XMC4700 Radar Baseboard Wiki](https://github.com/Infineon/XMC-for-Arduino/wiki/Radar-Baseboard-XMC4700).
172
+
This is due to the hardware modifications required on the Radar Baseboard regarding the ISCP header as mentioned in [the XMC4700 Radar BaseboardWiki](https://github.com/Infineon/XMC-for-Arduino/wiki/Radar-Baseboard-XMC4700).
173
173
The second diagram below illustrates the required connections.
7. Turn on the 24 VDC power supply to the RGB LED Lighting Shield and connect the Radar Baseboard XMC4700 to the PC via a USB cable onto the **Debug** USB port.
179
+
7. Turn on the 24 VDC power supply to the RGB LED Lighting Shield and connect the XMC4700 Radar Baseboard to the PC via a USB cable onto the **Debug** USB port.
In case this does not happen, disconnect from the app, press the reset button on the Radar Baseboard XMC4700 and retry the connection.
203
+
In case this does not happen, disconnect from the app, press the reset button on the XMC4700 Radar Baseboard and retry the connection.
204
204
205
205
Make some movement in front of the radar board and observe the measured speed and detected direction on the GUI. You may also observe the light from the RGB LED changing with regards to the motion and its direction.
0 commit comments