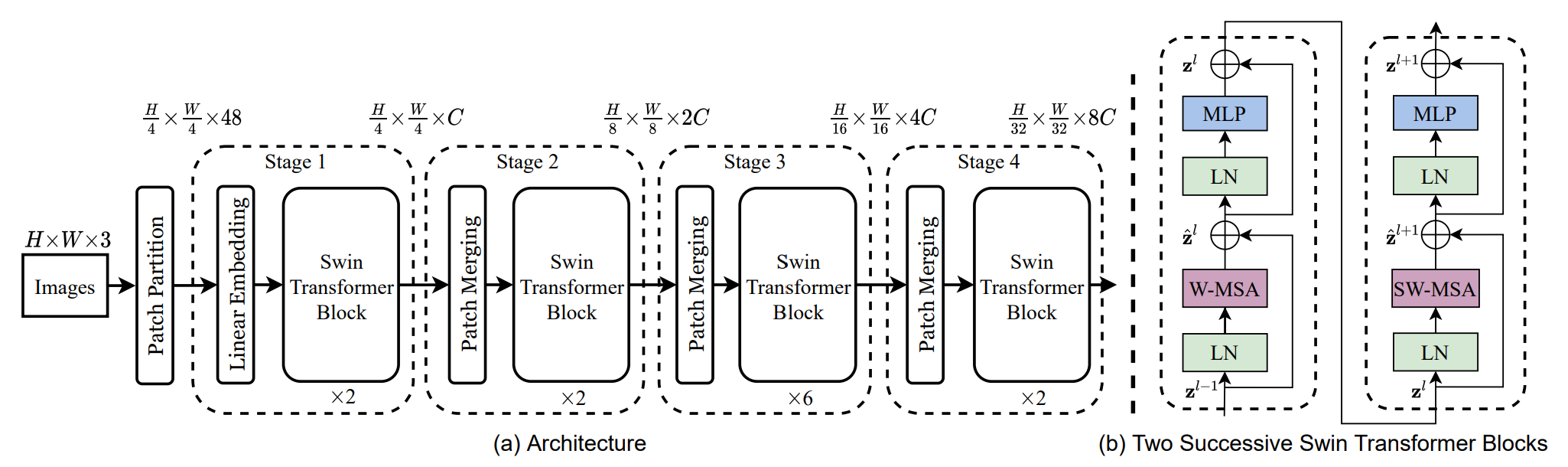
This project is an implementation of the paper "Swin Transformer: Hierarchical Vision Transformer using Shifted Windows". The Swin Transformer serves as a general-purpose backbone for computer vision tasks, effectively addressing the challenges of adapting Transformer models from language to vision.
(All experiments were done on the Higher School of Economics HPC cluster 'cHARISMa' — big thanks to the team!)
The Swin Transformer model (SwinT variant) was pretrained on the ImageNet-1k dataset for the classification task. Training logs and detailed experiment results can be found in experiments/experiment_1. The achieved accuracy closely matches the results reported in the original paper:
| model | accuracy@1 | accuracy@5 |
|---|---|---|
| SwinT (~28M params) | 0.8060 | 0.9510 |
For the detection task, conducted on the Microsoft COCO dataset, an SSD framework was implemented. Several Swin-based backbones were designed alongside reference ResNet-based backbones. The SSD detector was evaluated with different backbones and neck variants—two well-known and one newly proposed. The architectures of the proposed backbone networks are illustrated below:

The key detection results are summarized in the table below. The metric reported is the COCO mean Average Precision (COCO_mAP), calculated over IoU thresholds ranging from 0.5 to 0.95 with 11 evaluation points:
| necks▶ backbones▼ |
no neck | FPN | PAN | DenseFPN |
|---|---|---|---|---|
| ResNet50Backbone_A | 0.228332 | -- | -- | -- |
| ResNet50Backbone_B | 0.247096 | 0.250236 | 0.252202 | 0.253052 |
| SwinTBackbone_A | 0.164175 | -- | -- | -- |
| SwinTBackbone_B | 0.258104 | 0.259176 | 0.258641 | 0.256729 |
Noteworthy: training with Swin backbones is ~1h faster (~6.5 hours versus ~7.5 hours)
-- in progress
📦swin_transformer
┣ 📂configs # training configurations
┃ ┣ 📜SwinT_clf_300e_default.yaml
┃ ┣ 📜detection_ssd_SwinT.yaml
┃ ┣ 📜detection_ssd_resnet50.yaml
┃ ┗ 📜diffusion_unet_SwinT.yaml
┃
┣ 📂detection
┃ ┣ 📜backbones.py
┃ ┣ 📜data.py
┃ ┣ 📜necks.py
┃ ┣ 📜ssd.py
┃ ┣ 📜test.py # source for full validation pipeline
┃ ┣ ⚙️test_detection.sbatch # slurm script -> test.py (no DDP)
┃ ┣ ⚙️train_det_ddp.sbatch # slurm script -> training.py (DDP)
┃ ┣ 📜training.py # source for training
┃ ┗ 📜utils.py
┃
┣ 📂diffusion
┃ ┣ 📜data.py
┃ ┣ 📜diffusion_model.py
┃ ┣ 📜schedulers.py
┃ ┣ ⚙️train_diff_ddp.sbatch # slurm script -> training.py (DDP)
┃ ┗ 📜training.py # source for training
┃
┣ 📂experiments
┃ ┣ 📂experiment_0 # trial run
┃ ┣ 📂experiment_1 # ImageNet classification -> SwinT
┃ ┃
┃ ┣ 📂experiment_2 # SSD detection -> ResNet (B)
┃ ┣ 📂experiment_3 # SSD detection -> ResNet (B) + FPN
┃ ┣ 📂experiment_4 # SSD detection -> ResNet (B) + PAN
┃ ┣ 📂experiment_5 # SSD detection -> ResNet (B) + DenseFPN
┃ ┣ 📂experiment_6 # SSD detection -> SwinT (A) (short scheduling)
┃ ┣ 📂experiment_7 # SSD detection -> SwinT (B) (short scheduling)
┃ ┣ 📂experiment_8 # SSD detection -> SwinT (B)
┃ ┣ 📂experiment_9 # SSD detection -> SwinT (B) + FPN
┃ ┣ 📂experiment_10 # SSD detection -> SwinT (B) + PAN
┃ ┣ 📂experiment_11 # SSD detection -> SwinT (B) + DenseFPN
┃ ┃
┃ ┣ 📂experiment_12 # diffusion -> SwinUNet (CIFAR-10)
┃ ┣ 📂experiment_13 # diffusion -> SwinUNet (CIFAR-10)
┃ ┗ 📂experiment_14 # diffusion -> SwinUNet (MNIST)
┃
┣ 📂notebooks # some old colab drafts
┃ ┣ 📜ImageNet_classification.ipynb
┃ ┗ 📜playground.ipynb
┃
┣ 📂saved_weights
┃ ┣ 📦SwinT_statedict.pth # stored locally
┃ ┗ 📦resnet50_statedict.pth # stored locally
┃
┣ 📜data.py
┣ 📜model.py # Swin Transformer implementation
┣ ⚙️train_clf_ddp.sbatch. # slurm script -> training.py (DDP)
┣ ⚙️train_clf_default.sbatch
┣ 📜train_clf_imagenet.py
┗ 📜training.py # source for classification training