{kind=link}
{kind=link}
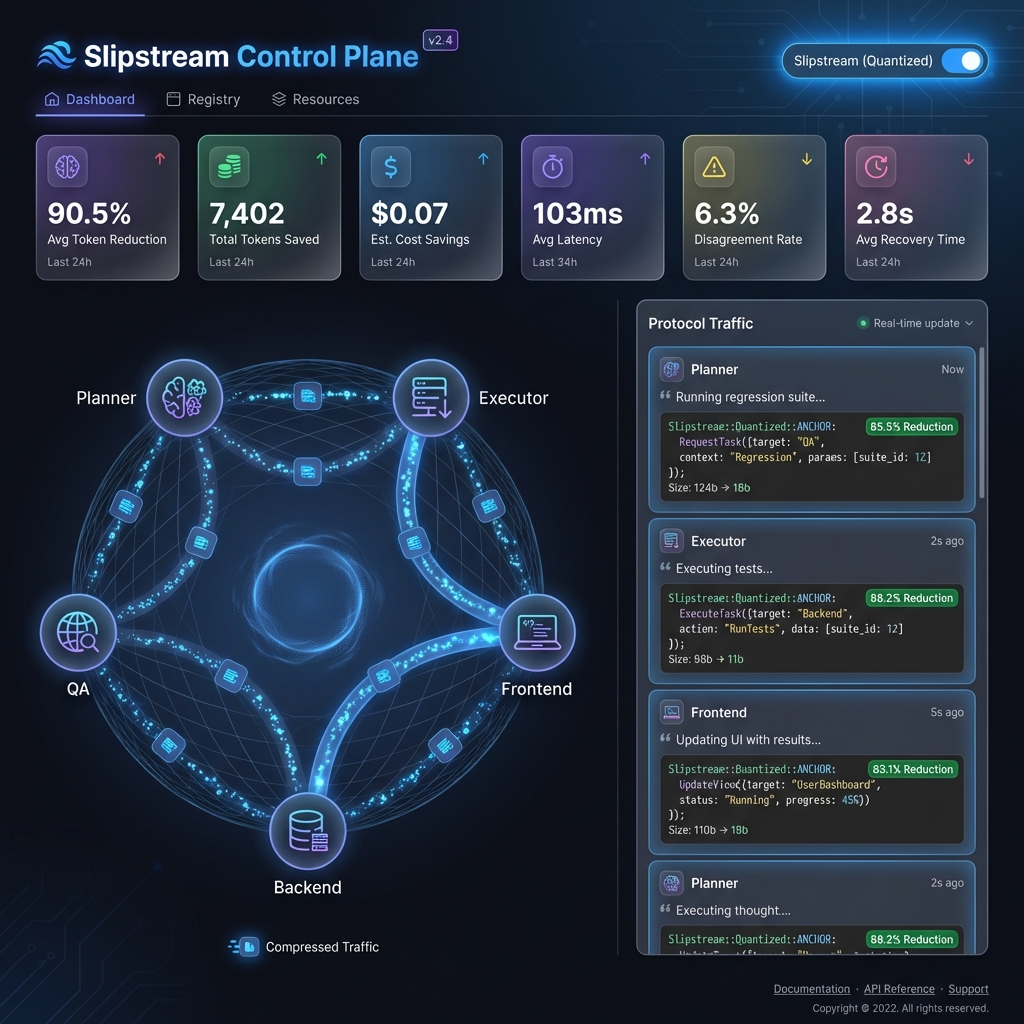
The Slipstream Control Plane is a real-time observability and management dashboard for the Slipstream semantic quantization protocol. It provides a visual layer for monitoring agent-to-agent communication, token efficiency, and protocol health.
 (Replace with your actual screenshot link after uploading to GitHub)
(Replace with your actual screenshot link after uploading to GitHub)
Slipstream is a protocol that allows LLM agents to communicate using Semantic Anchors instead of raw natural language. This achieves up to 92% token reduction by mapping intents to a shared 4D semantic manifold.
The Control Plane is the "Mission Control" for these swarms, allowing humans to:
- Visualize Traffic: See messages flowing between agents in real-time.
- Monitor Metrics: Track Avg Latency, Disagreement Rate, and Recovery Time.
- Tune the Protocol: Approve new semantic anchors suggested by the automated Autotuner.
- Inspect the Registry: Browse the Universal Concept Registry (UCR) that defines the agent language.
- Dynamic Network Graph: Automatically discovers and maps new agents as they join the stream.
- Incident Saga Simulation: A built-in 50-step "Memory Leak" scenario demonstrating real-world protocol usage.
- Interactive Autotuner: Real-time proposal system for extending the protocol when fallback is detected.
- Deep Monitoring: Dual-view message logs (English vs. Slipstream formats).
- Python SDK: Seamlessly connect external agents to the visualizer.
- Frontend: React, Tailwind CSS, Framer Motion, Lucide Icons.
- Backend: FastAPI (Python), WebSockets, SlipCore.
- Protocol: Slipstream Semantic Quantization.
- Python 3.10+
- Node.js 18+
cd backend
pip install -r requirements.txt
uvicorn main:app --reloadcd frontend
npm install
npm run devTo connect your own agents, refer to backend/INTEGRATION.md.
- Research Paper: Zenodo (DOI: 10/5281/zenodo.18115418)
- Official Library: SlipCore
- Models: Hugging Face Collection
Created for the Slipstream Protocol Hackathon.